Hay pequeños gestos que son capaces de construir grandes hazañas. En multitud de ocasiones, y con el fin de ayudar a los demás y hacerles la vida más fácil, sólo tenemos que hacer uso de la empatía. Cuando una persona se pone en la piel de otra se crea una conexión solidaria a través de la cual, sin duda, se consiguen superar retos y obstáculos para poder ser una sociedad inclusiva y diversa en plenitud.
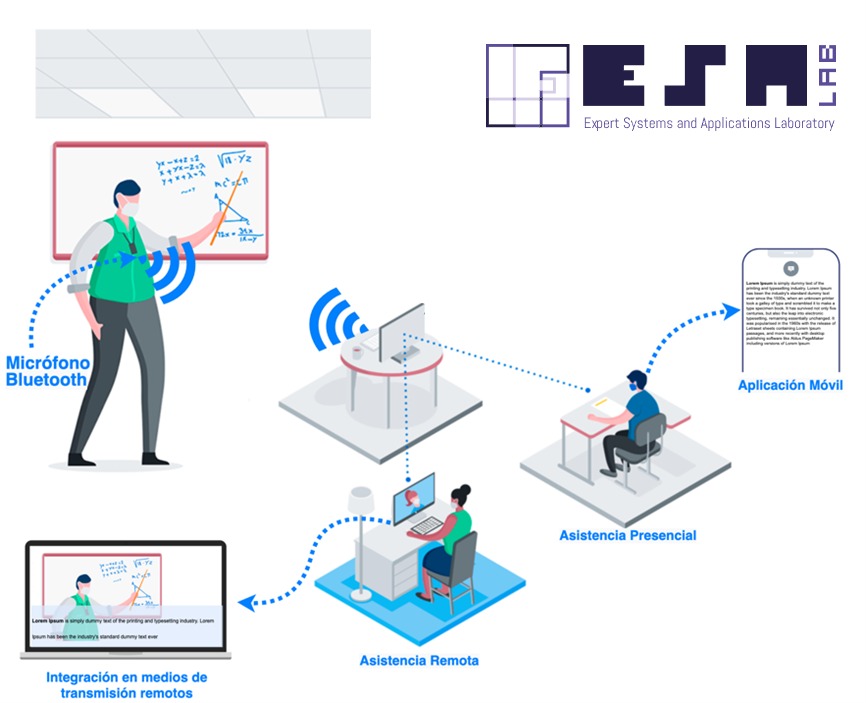
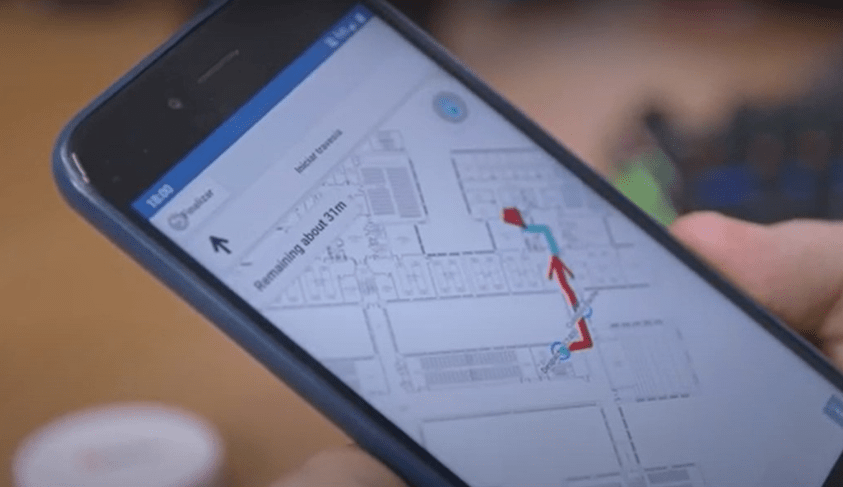
De hecho, es gracias a esta conexión emocional con las personas por lo que ha sido posible, entre otros aspectos, junto con la investigación y la tecnología más puntera, desarrollar de manera exitosa proyectos que han tenido un impacto sin parangón en el día a día de las personas. Este es el caso de SmartLazarus, una aplicación móvil diseñada por el Grupo ESALab de la Universidad de Salamanca, liderado por el profesor e investigador Gabriel Villarrubia González, que es capaz de guiar a personas con discapacidad visual en espacios cerrados.
Esta solución tecnológica, que tardó alrededor de un año en ver la luz, fue seleccionada entre más de 70 presentadas por diferentes universidades españolas en el marco de la II Convocatoria de Ayudas a Proyectos de Investigación de Tecnologías Accesibles que anualmente organizan Indra y Fundación Universia, de Banco Santander.
Read More